About me
I am Mengdi Li, a master student at South China University of Technology. My research interest is in the distributed cooperative control of multi-agent. And I am very interested in and willing to learn all kinds of cutting-edge technologies.
Specifically, I have explored and realized the cooperrative control of underactuated unmanned sufrace vehicles in enclosing a moving target with collision avoidance and connectivity maintenance. And I have carried out numerical simulation, 3D simluation and real experiment verifcation. For 3D simulation, I built a 3D simulation platform based on Unreal Engine 4 suitable for unmanned system control algorithm simulation, which has the characteristics of universal and fast verification of the algorithm. I have sufficient engineering experience on deploying algorithms and 3D simulation for various unmanned system such as USVs and UGVs.
Education
Master, Control science and engineering
School of Automation Science and Engineering
Top 25%
Bachelor of Engineering, Automation
School of Automation
Top 5%
InternShip
Intern, C++ development
Development of Umeng+ basic product line of SDK products.
Intern, Algorithm intern
Research and development of Lidar human eye safety assessment module.
Intern, Battery technology
Research and development of battery health inspection and V2G.
Research Experiences
- To slove the enclosing control problem of multiple unmanned surface vehicles (USVs) without the velocity information of the target, a cooperative enclosing control protocol is presented to achieve that a single USV can enclosing the moving target with collision avoidance and connectivity maintanence.
- Barrier Lyapunov functions (BLFs) are introduced to ensure these relative distance and angle constraints in this research.
- Numerical simulation results, 3D Unreal Engine simulation results and real experiments demonstrate the performance of the proposed control protocol.

- Compared with the Single USV , it is obvious that multiple USVs has more advantages on enclosing the moving target. And the cooperative enclosing motions of multiple USVs are determined by maintaining the target-vehicle relative distance constraints and the inter-vehicle angle constraints.
- A cooperative enclosing control protocol is presented to achieve that all USVs converge to the desired spacing from neighboring vehicles while guaranteeing prescribed transient and steady-state performance.
- The Prescribed Performance Control(PPC) technology ensures the convergence speed and accuracy of the error.
- Numerical simulation results, 3D Unreal Engine simulation results and real experiments demonstrate the performance of the proposed control protocol.

- The blueprint is used to develop and build the simulation framework of unmanned system, including the trajectory description of particle system, the decomposition and setting of moving speed, etc.
- The communication network of the unmanned simulation platform is built by using TCP/UDP communication, and the interaction between environment information and algorithm instructions is realized.
- Camera scheduling is used to realize the multi-view and follow-up observation of the unmanned simulation platform.
- The formation controller is designed by the combination of Back-stepping technology and dynamic surface control technology.
- The uncertain term is approximated by neural network. The time-varying external disturbances are observed by disturbance observer.
- To overcome the shortcomings of the leader-follower method, the alternate vehicle is introduced to replace leader in order to improve the stability of the formation system.
- MATLAB GUI-based software is used to demonstrate and verify the effectiveness of the algorithm. The app implements a word-like startup screen.
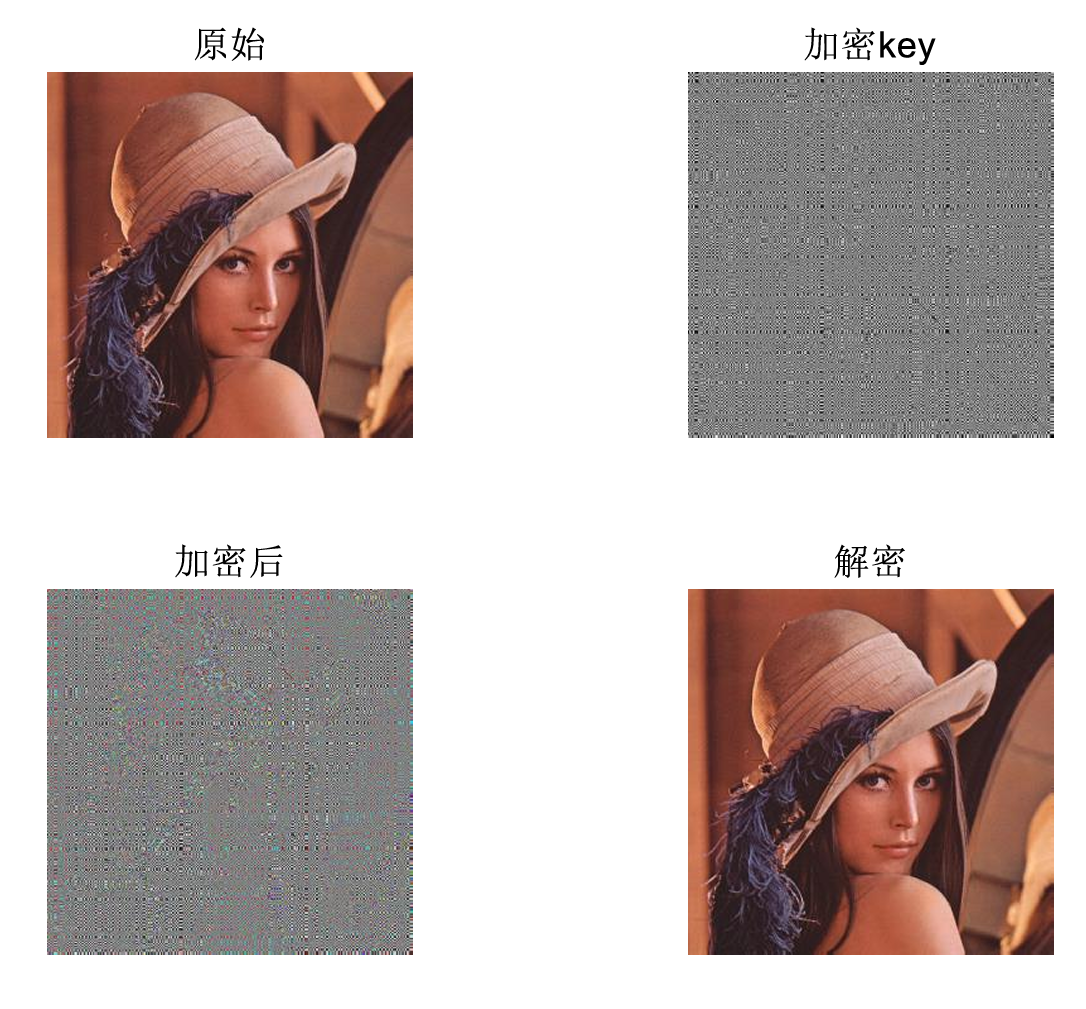
- Using MATLAB/Simulink to construct Chua’s chaotic circuit model, the synchronization control design of chaotic system is realized, and the synchronization of master-slave system is ensured.
- A long-distance image encryption and decryption system based on Chua’s chaotic system is designed to ensure the integrity and security of information in the process of transmission.
Honor & Awards
- National Encouragement Scholarship(Three consecutive years)
- Outstanding graduates
- First academic scholarship
- Outstanding Communist Youth League member
Skills
- Programing: C/C++、MATLAB/Simulink、Python、Objective-C
- Development Tools: GCC、GDB、GIT、Unreal Engine 4、Xcode、Leaks
- Others: AUTOSAR、APSICE、MBD、HTTP、TCP/IP、CAN Bus、MIL/SIL/PIL/HIL 、Charles